18.06.2024
Doppeleuropameister
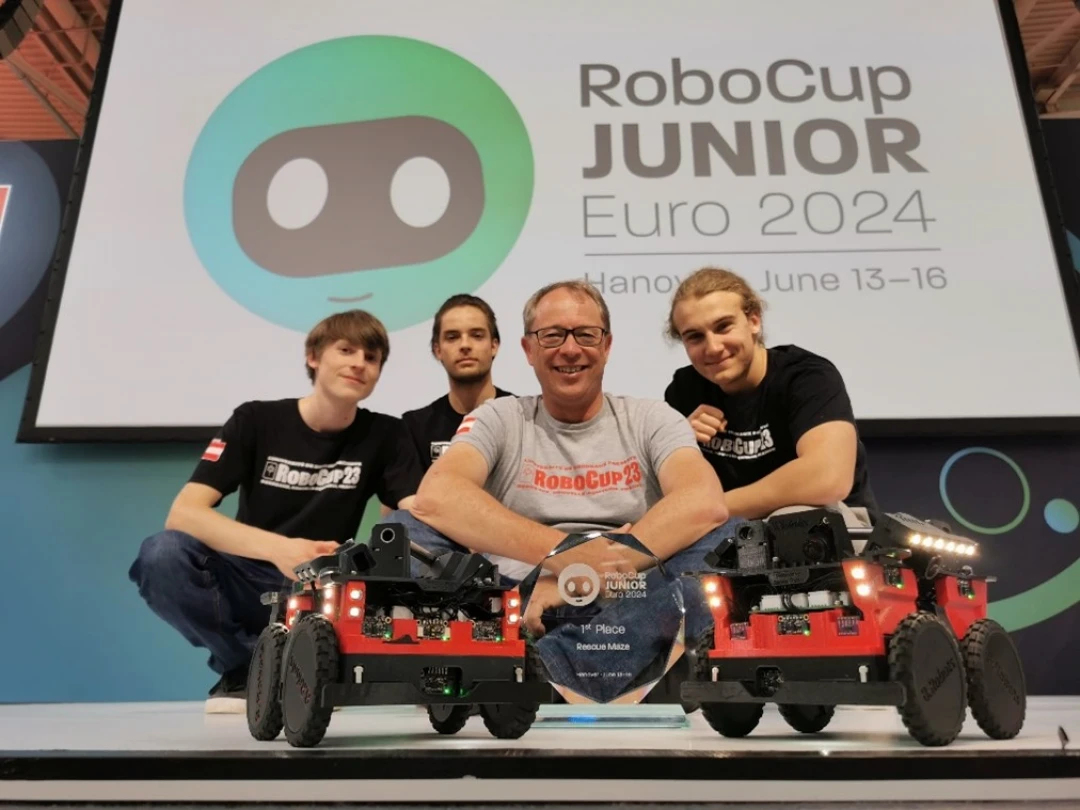
Die Robocup Junior Europameisterschaft fand heuer von 12. bis 16. Juli in Hannover statt. Die besten 140 Teams Europas mit über 400 Teilnehmer:innen kämpften in verschiedenen Ligen um Medaillen. Das BULME-Team B.Robots Seniors schaffte es ganz nach oben und wurde doppelter Europameister!
Das Team siegte nicht nur in der Kategorie „Rescue Maze“, sondern auch im Super-Team-Bewerb, bei dem 3 Teams gemeinsam vor Ort in einem Tag eine Aufgabe lösen mussten.
Beim Wettbewerb muss der Roboter in einem Labyrinth, welches ein eingestürztes Gebäude simulieren soll, vollständig autonom, ohne externem Eingriff, „Opfer“ in Form von Farbelementen und Buchstaben mit unterschiedlicher Bedeutung (U = Unharmed, H = Harmed, S = Safe) aufspüren und mit passender Anzahl von Hilfspaketen versorgen.
Insgesamt waren 10 Läufe mit ansteigender Schwierigkeits-stufe zu absolvieren, von denen die besten 8 gewertet wurden. Die B.Robots übernahmen bereits am 1. Wettbewerbstag die Führung und gewannen den Wettbewerb mit großem Vorsprung auf die Zweitplatzierten.
Die Schüler haben mit einer CAD-Software den Roboter konstruiert, ihn mit einem 3D-Drucker ausgedruckt und die elektronische Schaltung mit einer Platine und die Software für das Mikrocontroller-Board entwickelt.
Der Roboter verwendet Allradbetrieb mit vier Motoren, um die verschiedensten Hindernisse (Speed-Bumps, Treppen, und Rampen) überwinden zu können. Für die Erkennung der „Opfer“ in Form von Buchstaben und Farbquadraten besitzt der Roboter jeweils eine Kamera auf der linken und der rechten Seite, deren Bilder mittels neuronalen Netzwerks ausgewertet werden. Mit einem zusätzlichen Motor und einem selbst konstruierten Auswurfsystem werden Hilfspakete abgeworfen.
Mit mehreren Time-of-Flight-Sensoren, wie sie auch bei Smartphones verwendet werden, kann der Roboter die Distanz zu Wänden und Gegenständen messen. Mittels Gyro- und Beschleunigungssensor werden präzise Informationen über die Bewegung des Roboters in X-, Y- und Z-Richtung ermittelt. Der Roboter hat außerdem einen, auf den Boden gerichteten, Farbsensor, damit er verbotene Zonen (blaue und schwarze Flächen) erkennen kann.
Der Roboter merkt sich mit einem komplexen Algorithmus den Status der verschiedenen Felder und den Weg durch das Labyrinth (Mapping). Die „Königsdisziplin“ besteht darin, alle Felder abzusuchen und am Schluss wieder auf das Startfeld zurückzufinden.